A l’instar des voitures thermiques, tous les moteurs électriques ne se ressemblent pas malgré une forme quasi identique.
Il existe pourtant trois grands types de technologies actuellement sur le marché. On fait le tour.
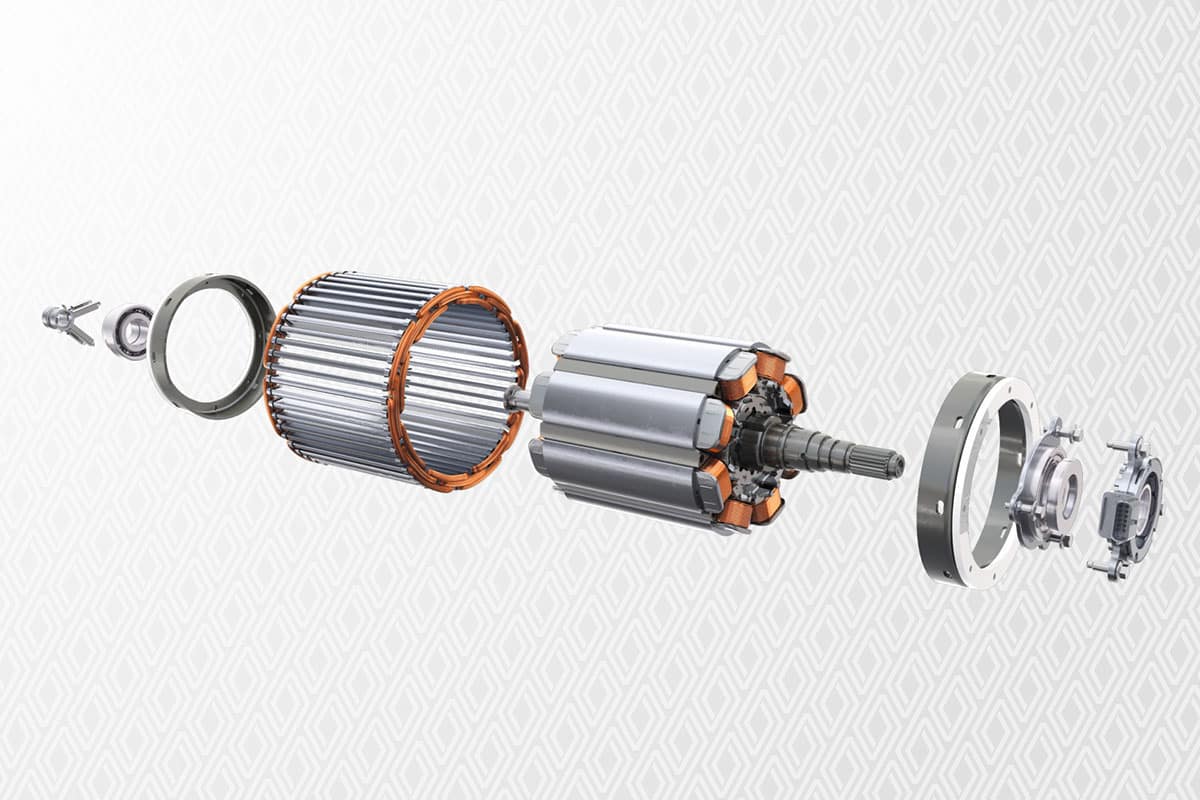
Un moteur électrique, ou une machine électrique si l’on reprend le véritable terme technique en raison de leur réversibilité, est composé d’un stator et d’un rotor. Comme son nom l’indique, le stator est la partie fixe, statique donc, à l’extérieure du moteur et ou transite le courant. Le rotor, au centre, tourne en fonction de ce champ magnétique. Selon la façon dont est actionné le rotor, on parle alors de moteur asynchrone ou synchrone, ce dernier pouvant être à aimant permanents ou à rotor bobiné. Voyons les différences.
L’asynchrone, ou le moteur à induction
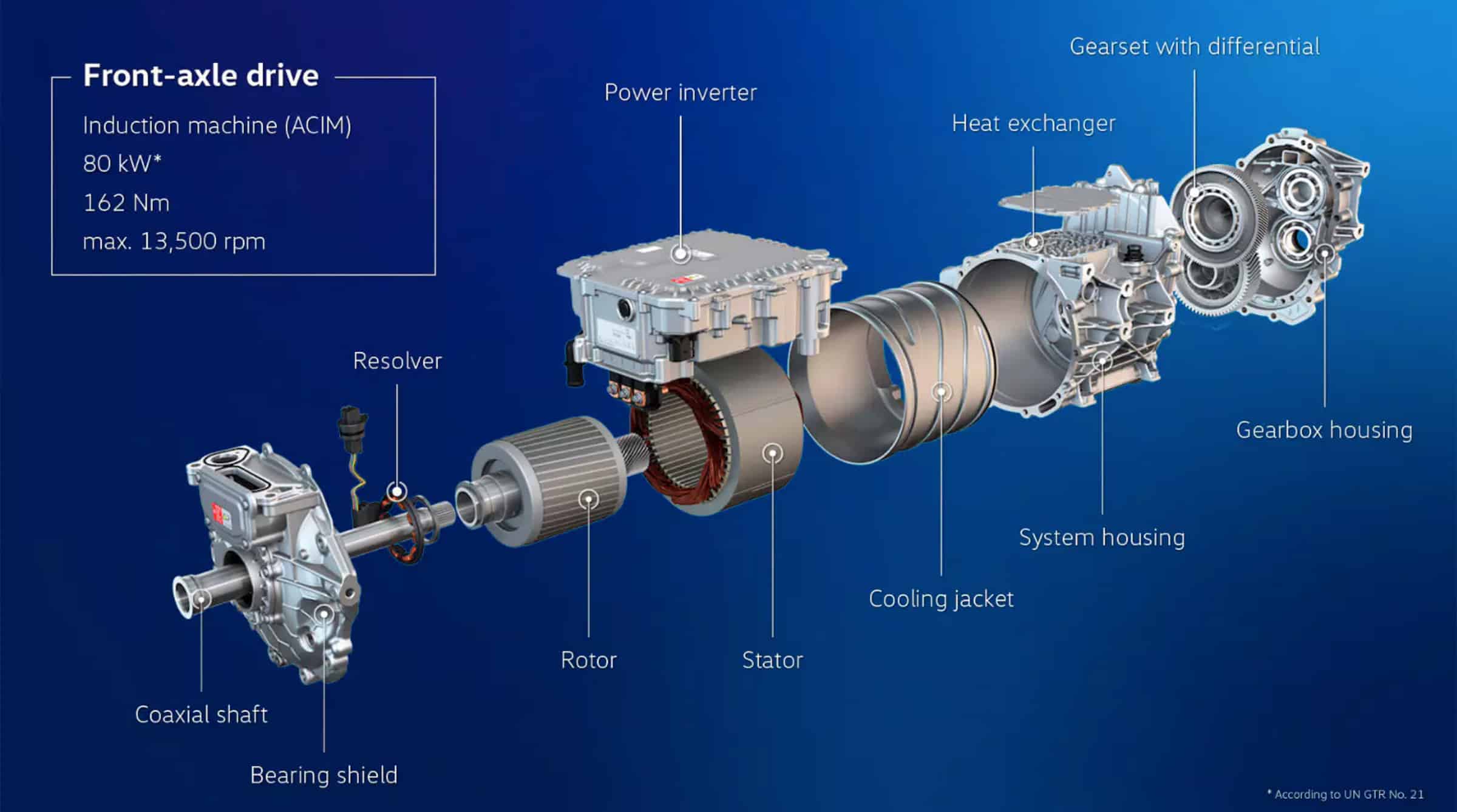
Comme son nom ne l’indique pas forcément ici, le bloc asynchrone n’est pas synchronisé avec le stator. Cela signifie donc que le rotor suit avec du retard le champ magnétique induit, que l’on appelle également le glissement. Simple de conception et dénué d’aimants, ce moteur est donc peu couteux à produire. Surtout, ils ne produisent pas de résistance électromagnétique lorsqu’ils sont immobiles. A l’instar de la désactivation des cylindres (pour schématiser), ce moteur peut être coupé lors des phases de roulage ne nécessitant pas de puissance. C’est la raison pour laquelle il vient très généralement en combinaison d’un moteur synchrone sur les modèles à transmission intégrale. Un fonctionnement nécessaire puisque une fois en rotation, ce type de moteur ne se montre pas aussi efficient qu’un moteur synchrone en raison du glissement, à moins de maîtriser la technologie comme chez Tesla, ce qui n’est pas sans surcoût.
Synchrone à aimants permanents
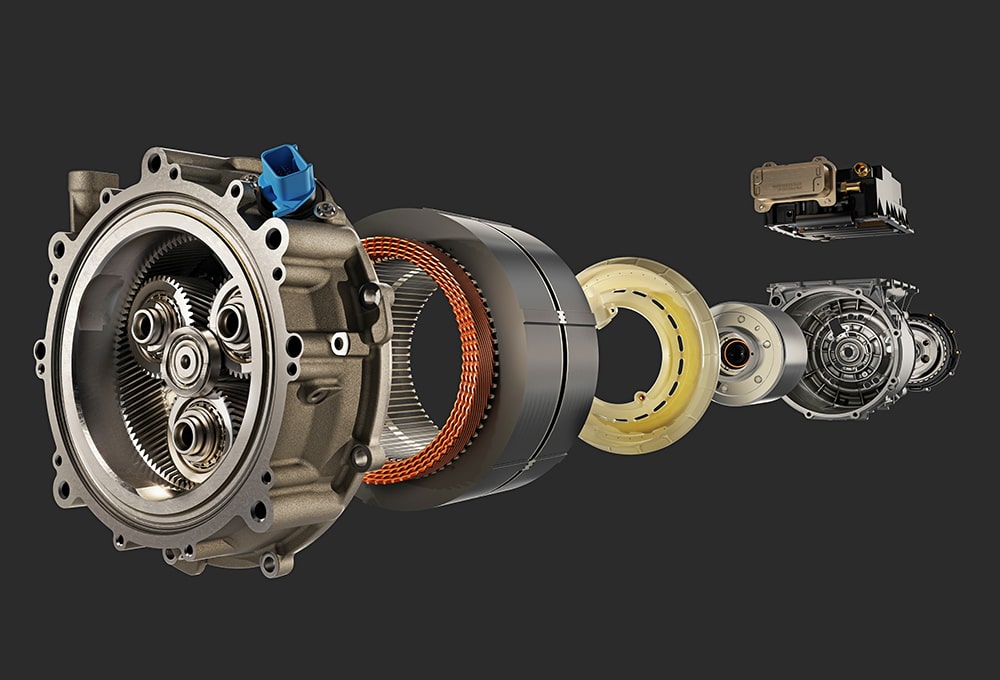
De loin le plus rependu, le bloc synchrone à aimants permanents dispose d’un stator ou circule le courant, qui vient créer un champ magnétique sur les aimants présents dans le rotor. Ce phénomène fait donc tourner le rotor à la même vitesse que le courant, d’où son nom de synchrone. Compact et d’une relative simplicité de mise au point, ce moteur offre le meilleur rendement et donc la meilleure efficience. On peut également ajouter une meilleure fiabilité dans le temps en raison de se configuration technique. Cependant, la fabrication des aimants est chère, et utilise surtout des métaux rares (qui n’ont de rares que le nom), dont l’extraction est une activité extrêmement polluante.
Synchrone à rotor bobiné
Le principe de fonctionnement est parfaitement identique au moteur à aimants permanents. Cependant, le rotor est composé de bobines de cuivres (d’où son nom) qui, une fois alimentées en courant, deviennent des électro-aimants. L’avantage : cela permet de se passer d’aimants et de réduire les coûts. En revanche, cette technologie présente bien des inconvénients. D’une part, l’alimentation du rotor est énergivore, notamment en ville puisque le courant peut être réduite sur autoroute pour limiter la consommation. Aussi, l’alimentation des bobines est assurée par des balais, qui font transiter le courant a contact du rotor. Ce qui signifie que ce moteur dispose de pièces d’usure. Enfin, il faut maîtriser la technologie pour proposer une densité énergétique équivalente à celle du moteur à aiants permanents.